-
阀门不动作DCS输入/输出故障及阀门定位器故障维修处理
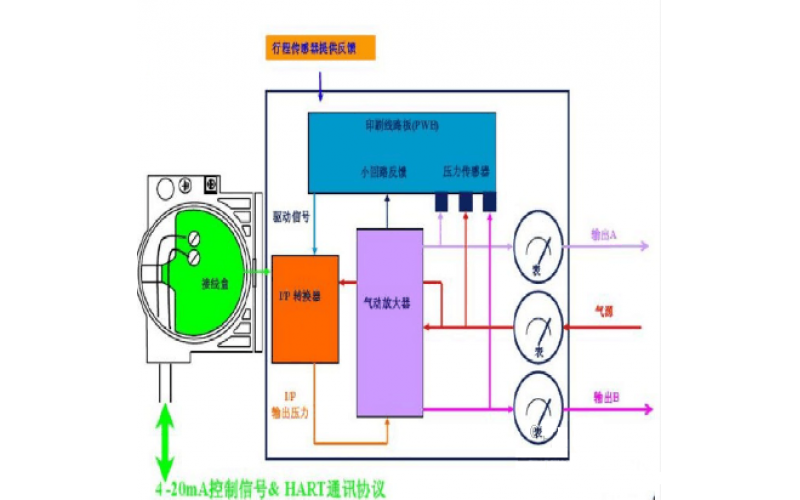
工作原理:从控制系统过来的输入信号(4-20mADC)经过信号线接到接线盒。电子模块处理器读取输入控制信号和阀位反馈信号,经过数字运算处理并转换成模拟量的控制驱动信号给I/P电器转换器,I/P将电信号转为气信号并由气动放大器功率放大,提供两路气动输出(不同的阀位设定可以看到输出A/B的风压表指示的变化,当输入12mADC时,可以看到A/B两个风压表指示差不多。单作用的则只有一路气动输出。)来推动阀门动作。阀门定位器的气压输出阀门控制阀门开关,当阀杆位置变化相应的磁条位置也会发生变化,霍尔传感器检测出阀位变,信号送给电子模块。直到阀位输入控制信号相一致的正确阀位上,偏差很小时,I/P电气转换器信号随之稳定,气动放大器输出气压随之稳定,一个定位控制过程结束。
2022-03-28 安博anbo(中国)